Anfang der 40er Jahre entstand der Fesselflug in den USA. Das Prinzip nannte man U-Control wegen des U-förmigen Steuergriffs und wurde von N.E. Walker erfunden. Über die beiden Steuerleinen konnte das Höhenruder gesteuert werden. Walker konnte sogar schon über eine dritte Leine noch den Zündzeitpunkt des Benzinmotors verstellen.
Bald darauf wurde schon der erste Baukasten angeboten und der Fesselflug verbreitete sich schnell in den USA.

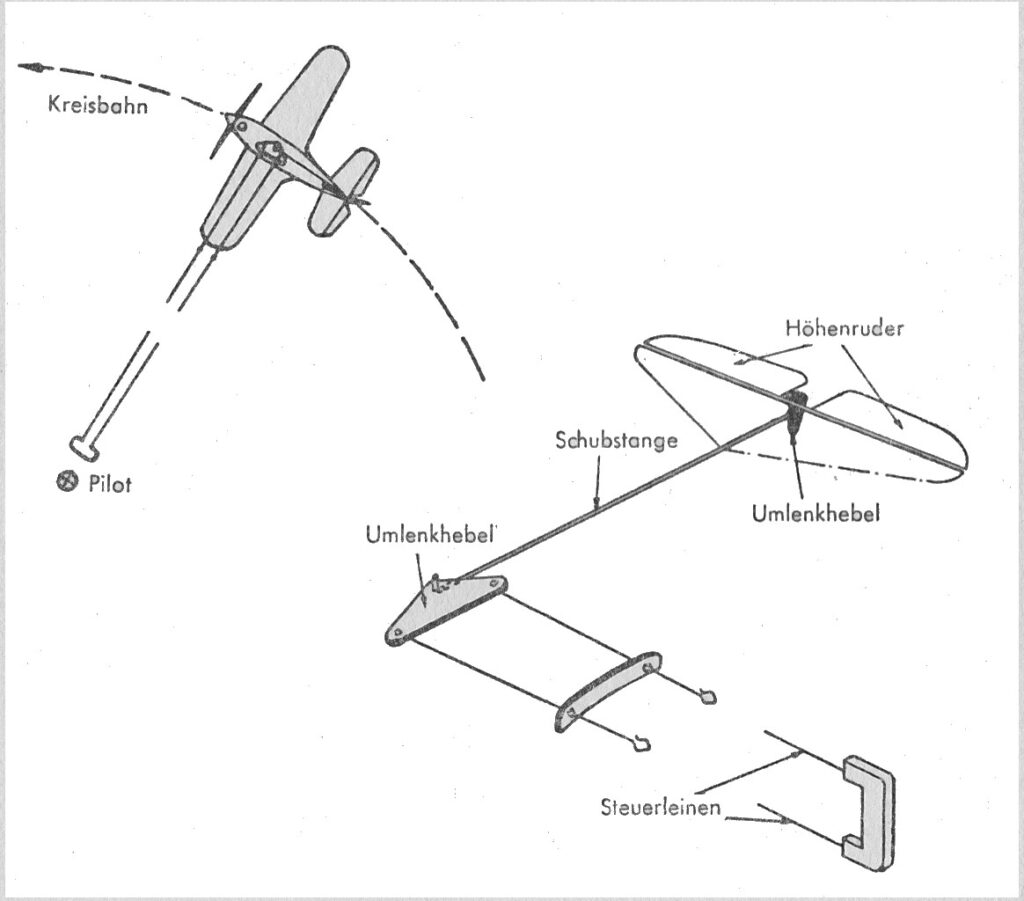
Die Zeichnung unten (aus Gernot Nobling, Fesselflugfibel, Topp-Verlag, Erscheinungsjahr unbekannt) zeigt etwas übersichtlicher das Steuerungsprinzip eines Fesselflugzeuges. Durch „Ziehen“ und „Drücken“ des Handgriffs verschieben sich die beiden Steuerleinen gegeneinander und bewegen so das Rudersegment (Umlenkhebel), das meist in der Tragfläche eingebaut ist. Die Bewegung des Segments wird über die Stoßstange zum Ruderhorn übertragen, so dass das Höhenruder entsprechend ausschlägt. Wie bei allen Flugzeugen bedeutet auch beim Fesselflug „Ziehen“, dass das Flugzeug nach oben fliegt, beim „Drücken“ entsprechend umgekehrt. Somit kann man mit einem Fesselflugzeug jeden Punkt auf einer Kugelhalbsphäre erreichen. Neben dem Normalflug bei konstanter Höhe, sind z. B. Auf- und Abwärtsbewegung, Loopings, Achten, Halbkreise möglich. Ein großer Vorteil des Fesselflugs ist aber, dass man über den Handgriff auch noch die Flugbewegungen des Modells spürt, was bei allen anderen Modellflugklassen nicht möglich ist.